
This month we are delighted to feature Dave Rapaport, Head of US Research and Collaboration Management at Siemens Technology. Dave, and other Siemens Technology team members, have been an active contributor on both the strategy and project front since the Institute’s inception. In this feature, Dave shares the work that his organization does with robotics and AI and his involvement with the ARM Institute.
1. Dave, please tell us about your role at Siemens Technology.
As US Research and Collaboration Management Head of Siemens Technology, I lead a team that is responsible for focusing on the company’s technological future; managing relationships with external technology partners such as government and universities; and enhancing the organization’s brand internally and externally. Additionally, I lead the company’s quality management team and serve on multiple strategic advisory boards on research and development activities.
2. Can you also tell us about the mission of Siemens Technology?
Our mission is to bring us closer to our customers and collaborators by driving their success and Siemens growth by leading the development of tomorrow’s technologies, together. We do this with our clear focus on core technologies. Through successful results of a collaboration between research and business, we enable Siemens to make our customers and collaborators successful in all of their markets.
Siemens Technology (T) is the central research center of Siemens. In collaboration with the Siemens business units, T drives the development of essential technologies for the entire company, including data analytics and artificial intelligence, simulation and modeling, cybersecurity, the industrial internet of things, additive manufacturing, new materials, power electronics, energy systems and storage.
3. What is the importance of robotics in the work that you and your team undertake?
In today’s manufacturing, robots deployed across various industries are mostly doing repetitive tasks. The robots’ overall task performance hinges on the accuracy of their controllers to track predefined motions. The ability of robots to handle unconstructed, complex environments, such as the flexible grasping of previously unknown objects or the assembly of new components, is very limited. Endowing machines with greater levels of intelligence to acquire skills autonomously and to generalize unseen situations would be a game-changer for quite a few industry sectors.
The main challenge to robot evolution is the need to design adaptable yet robust control algorithms that can address all possible system behaviors and also the necessity of “behavior generalization,” e.g. the ability to react to unforeseen situations. Two forms of artificial intelligence, Deep Learning and Reinforcement Learning (that can use Deep Learning), hold notable promise for solving such challenges because they enable robots in manufacturing systems to deal with uncertainties, to learn behaviors through interaction with their surrounding environments, and ideally generalize to new situations. Let’s take a look at how Deep Learning and Reinforcement Learning play a key role in the aforementioned use cases: flexible picking and the assembly of new components.
Humans are equipped with a universal picking skill. Even if they encounter an object that they have never seen or grasped before, they will immediately know where to grasp the object in order to successfully lift it. Robots in today’s manufacturing must be explicitly programmed so that they can approach a predefined grasp pose and execute the grasp. This requires the objects to be grasped to be always in the same position and orientation (think of an assembly line). The challenge to programmers is finding a way to get robots to grasp an unknown object at any orientation. This is where Deep Learning comes in.
Deep Learning operates through artificial digital neural networks—large, non-linear function approximators that are loosely inspired by the human brain. State-of-the art neural networks have millions of parameters. Using a dataset of input-output relationships, these parameters can be set so that the neural network can predict the specific output for a given input.
This is how Deep Learning can be applied to grasping. Instead of programming the robot on how to grasp, the programmers provide the robot, via the neural networks, examples of grasping. The robot training data consists of images or models of various objects as well as how to grasp them. Given a database of millions of such examples, the neural network learns how to compute grasps for any given image of an object. These examples can be conveniently created in simulation. The robot masters the skill of grasping without executing a single grasp in the real-world.
Another intelligent-robot approach to industrial tasks is based on reinforcement learning (RL). RL is a framework of principles that allows robots to “learn” behaviors through interactions with the environment; i.e., the data comes from actual surroundings. Unlike traditional feedback robot-control methods, the core idea of RL is to provide robot controllers with high-level specifications of what to do instead of how to do it. As the robot interacts with the environment and collects observations and rewards, the RL algorithm reinforces those behaviors that yield high rewards. Recent progress in RL research introduced deep neural networks for modelling the robot’s behavioral policy and its dynamics.
While the idea of RL is very promising for creating autonomous systems that learn, the adoption has been limited so far, because such large amounts of data are needed for robots to learn successful control policies. Thus, executing all this training on real robot hardware is problematic, because it takes such a long time and results in wear and tear on the equipment. Recent research in RL is aimed toward reducing the required training amount on real robots.
Ultimately, for the sake of flexible grasping and object assembly, what researchers want to create is a robot that can solve tasks in a flexible way by making its own decision, using its own skills, while the operator specifies high-level commands only. For example, instead of programming the trajectories for a successful grasp, we just ask the robot to grasp a component and then let the robot decide on the execution.
What does this all mean for the future of the manufacturing industry? AI-enhanced robotics is considered a prerequisite for flexible manufacturing and lot-size-one-production. When preprogramming isn’t a necessity for every single robot motion, then robots will become economically viable for rapidly changing product configurations.
4. Siemens is actively involved with several ARM projects. Can you share some information about these projects and their goals?
Autonomous Multi-Tool head Robotic Solution for High Precision Surface Preparation
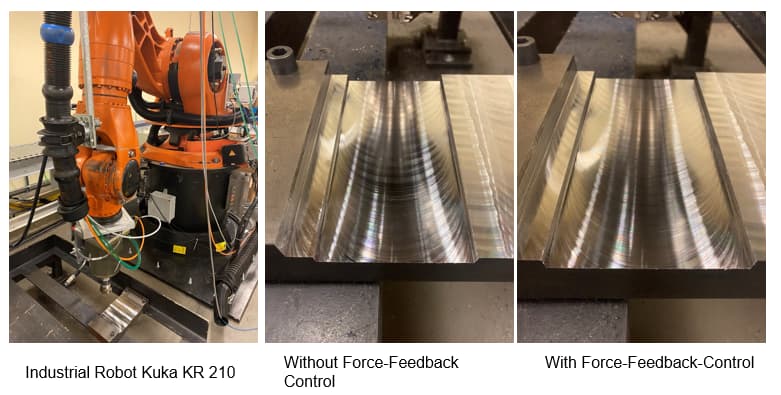
Read our full Project Highlight here. This project focuses on developing a robotic solution for performing high precision tasks, such as milling, grinding, and polishing under “in-the-field” and non-factory conditions. Such operations in the field using conventional methods such as CNC machining or manual griding and polishing can be cumbersome, time consuming and expensive. More importantly, these tasks can result in uncontained fumes, debris, chips, etc., and impact worker health and safety. The key technology elements that are being developed and will be integrated to realize the above objective includes – fast and ruggedized field deployment mechanism and installation of robot, equipped with a multi-head tool to effect griding, polishing or milling as desired; on board software systems for fast onsite positional calibrations and corrections of the robot; automated trajectory planning, autonomous process sequencing and closed loop feedback control for robotic milling.
Results
The team has successfully designed, manufactured, and tested shipping options for easy and fast deployment and onsite installation of the robot. The system is pre-wired to minimize the installation time at the site. Methodology for onsite positional calibration of the robot has been developed and tested. A Renishaw probe is used to assess the “as-is” condition of the surface to be processed. A software program, using machine learning techniques, was developed that can suggest the optimal process sequencing of the surface and parallelly computes the trajectory of the robot. Presently the team is finalizing the automated closed loop feedback control for the robotic milling that will be eventually integrated with the onboard software.
Next Steps
Next steps planned are to finish the integration of the system and demonstrate the technology by grinding and polishing a steam turbine casing horizontal joint. After system verification is complete, we plan to hand over this tool to the Siemens Pittsburgh Service Center. Depending on the size of the engine and casing, this technology has the potential to save between 300 manhours to 5000 manhours per instance (24 hours to 80 hours scope time). The technology is expected to be used about 4 times a year. Additionally, lost revenue to the utility when the turbine is not operational is also significantly reduced. This technology will be shared with other Siemens service centers globally.
SAFE Project
We successfully demonstrated an autonomous AGV for transport on the factory floor as part of the SAFE project. The solution relied on advanced perception capabilities (vision, lidar and acoustics), two Siemens DI FA packages for AGV automation (SiMove) and autonomous navigation using a virtual track (ANS+), both tailored for the SAFE AGV application, and control capabilities to drive the AGV.
Edge intelligence in Siemens PLCs and supporting hardware equipping the AGV allowed the implementation of advanced safety and human communication capabilities. The SAFE AGVs can operate seamlessly alongside humans and moving objects such as forklifts in the factory, while automating the transportation task.
– Siemens Energy (SE) management embraced the project and the real-world demonstrations, highlighting that the basic concept is working well. SE showed interest to extend the prototype by introducing in the factory AGV-focused use-cases in a step-by-step manner.
– Fori Automation highlighted that the project provided tools for improved safety and operation of AGV systems, many of which are a valuable add-on to further advance and improve automated material handling equipment in the marketplace.
– Siemens DI FA management is interested to follow up on specific capabilities developed in the project that go beyond present versions of ANS+ and SiMove.
A huge congratulations to the entire Siemens team, particularly given not only technical challenges but also execution challenges: the project was accomplished fully during the COVID period (Jan 2020 – Mar 2021).
Robotic Assembly of Garments
 Read our Project Highlight here. Despite being universally adopted throughout traditional manufacturing, industrial robots have failed to find a place in garment sewing applications due to the robots’ difficulties in handling limp textiles. This makes the global apparel industry strongly dependent on manual labor.
Read our Project Highlight here. Despite being universally adopted throughout traditional manufacturing, industrial robots have failed to find a place in garment sewing applications due to the robots’ difficulties in handling limp textiles. This makes the global apparel industry strongly dependent on manual labor.
The outputs from an Advanced Robotics for Manufacturing Institute (ARM Institute) funded technology project titled “Robotic Assembly of Garments” created considerable impact by taking the first steps in revolutionizing this trillion-dollar industry via a new robotic assembly process that stiffens garment pieces by laminating its fabric with water-soluble thermoplastic polymer.
This flexible robotic system was developed to handle and assemble fabric pieces into garments. Traditional sewing machines were controlled via Robot Operating System (ROS) to achieve synchronized operation with the robot. The polymer utilized in the process can be easily removed through washing and can be recycled for multiple process cycles. The technology was successfully demonstrated at Bluewater Defense production facility and is being further matured for more complex sewing operations.
UC Berkeley developed simulation models to support the various process steps. After developing and validating the core robotic technologies, the Siemens Technology AMA team integrated and validated the system operation before conducting the final demonstration at Bluewater Defense facility in Puerto Rico.
5. Siemens has been a member of the ARM Institute almost since our inception. What has the membership experience been like for you?
I have been a senior member of the Stakeholder Executive Council for the last 4 years. In my role, I was able to see first-hand the impact of US manufacturing through the innovations created in robotics and education through workforce development. As I mentioned above, Siemens has been quite active in multiple projects that affect the safety, collaboration, and advancement of robotic technology. The ARM Institute is an instrumental organization leading the way for the future of people and robots working together harmoniously to produce more efficient and cost-effective products for the US economy.
ABOUT THE ARM INSTITUTE
The ARM (Advanced Robotics for Manufacturing) Institute is a Manufacturing USA® Institute sponsored by the Office of the Secretary of Defense under Agreement Number W911NF-17-3-0004. The ARM Institute leverages a unique, robust and diverse ecosystem of consortium members and partners across industry, academia and government to make robotics, autonomy and artificial intelligence more accessible to U.S. manufacturers large and small, train and empower the manufacturing workforce, strengthen our economy and global competitiveness, and elevate national security and resilience. Based in Pittsburgh, PA since 2017, the ARM Institute is leading the way to a future where people & robots work together to respond to our nation’s greatest challenges and to produce the world’s most desired products. For more information, visit www.arminstitute.org and follow the ARM Institute on LinkedIn and Twitter.