Project Highlight: Time-Optimal Motion Planning Using Convex Sets
This ARM Institute-funded robotics project made significant advancements in optimizing robot motions. Now in commercial use, the project has generated a significant return and enabled one ARM Institute member to more rapidly scale their work in food preparation.
Project Team
Dexai Robotics (Principal Investigator), Massachusetts Institute of Technology (MIT)
Background & Problem Statement
The economic viability of implementing robotics on the manufacturing floor hinges on how quickly and reliably robots can complete complex tasks. The ARM Institute-funded project “Time-Optimal Motion Planning Using Convex Sets” addressed this barrier to adoption by developing a software package to optimize robot motions given task specifications. The project was then tested in a real-world, food assembly setting, where a robot arm uses utensils as end effectors to scoop and pick food ingredients from various containers and dispense them into a bowl. The results of this project have potential to extend well beyond food applications into wider multi-robot applications.
This project was selected from the ARM Institute’s 2023 Technology Project Call, which centered on the following topic areas:
- Automated Robotic Task Planning
- Multi-Robot, Multi-Human Collaboration, Task Sharing & Task Allocation
- Safe and Scalable Manufacturing of Energetics
- Artificial Intelligence (AI) in Robotics for Manufacturing
- Discovery Workshops and Market Studies
Technical Approach

The project team leveraged the latest advances in trajectory optimization using graphs of convex sets (GCS), which is a novel approach used to solve long-standing motion planning problems. The project team sought a mature, time-optimal, correct-by-design, motion planning framework using GCS.
This approach involves two distinct steps:
- First, the team generated the GCS in the configuration space of the robot such that every point in each convex set is valid, which means that the corresponding robot configuration satisfies all given constraints. Such constraints typically include user-defined collision avoidance and end-effector pose requirements. Ideally, the convex sets cover as much valid space as possible, but this goal could be relaxed.
- Second, the team connected the convex sets to construct a GCS and used a special type of mathematical optimization to find optimal motion plans such that the whole trajectory lies within GCS, and hence, is valid. Therefore, resulting in an optimal, correct-by-design, motion planner.
Project Impact
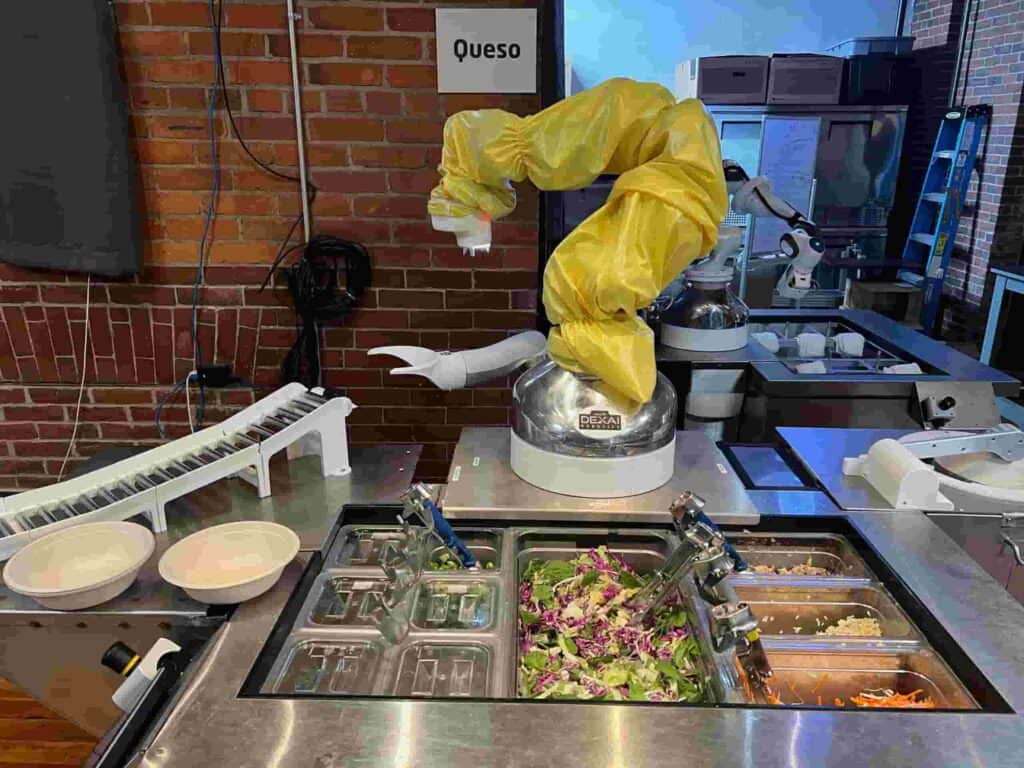
The Time-Optimal Motion Planning Using Convex Sets project was demonstrated at ARM Member Dexai Robotics on robots assembling meals in the lab and at multiple customer sites across the nation. The project has already been transitioned into commercial use at Dexai Robotics, resulting in a return exceeding $10,000/robot/year and dramatically improving the performance in the field, enabling Dexai to scale its food-assembly solution more rapidly.
In fact, according to the David Johnson, Dexai’s CEO: “after switching to this novel motion planning technique, our installed robots now operate much faster and are able to serve a larger number of people, as well as reduce food waste by eliminating collisions and other errors related to motion-planning edge-cases.”
The developed framework has potential applications beyond food preparation and could be particularly impactful in multi-robot applications and applications where robots need a variety of degrees of freedom. For example, the project team sees possible impact for multi-robot collaborative planning, where multiple robots collaborate on manipulating a shared object (for example: one robot holds a box while the other opens it). Another application could be planning robot contact with objects, such as when trying to fit shapes into slots without prior knowledge of either.
Outputs Available to ARM Members
As with all ARM Institute-funded projects, ARM Members have access to key outputs from this project through the ARM Member Community. Outputs from this project includes the following software modules:
- RobotModel: This module parses robot models from Unified Robotics Description Format (URDF) files.
- RobotConstraints: This module mathematically describes robot constraints, such as user-defined collision requirements, pose constraints, etc.
- IrisBuilder: Given a robot model and its constraints, this module has methods to generate valid convex sets, using a method acronymed as IRIS (Iterative Region Inflation via Semidefinite Programming), as described in the methodology.
- GcsPlanner: This module is akin to full GCS. There is a cache generation method that sets up a look table from a given set of planning problems.
- WarmGcsPlanner: Finally, given the cache from GcsPlanner, this module generates time-optimal trajectories very quickly.
ARM Members can log into the Member Community here to access project outputs, reports, and more member-exclusive information. Email [email protected] for assistance using the Member Community.
Ready to join us in building the future of U.S. manufacturing?
The ARM Institute leverages a robust consortium of 400+ member organizations spanning industry, government, and academia to catalyze robotics, AI, and workforce solutions. With a new Technology Project Call expected to be released in March, it’s a great time to join our consortium! Explore membership here to get early access to the Project Call and other resources that help you prepare a competitive response. Join our mailing list to get access to the Project Call when it is publicly available and to receive more ARM Institute updates.
Join our mailing list
ABOUT THE ARM INSTITUTE
The Advanced Robotics for Manufacturing (ARM) Institute is a Manufacturing Innovation Institute (MII) funded by the Office of the Secretary of Defense under Agreement Number W911NF-17-3-0004 and is part of the Manufacturing USA® network. The ARM Institute leverages a unique, robust, and diverse ecosystem of 400+ consortium members and partners across industry, academia, and government to make robotics, autonomy, and artificial intelligence more accessible to U.S. manufacturers large and small, train and empower the manufacturing workforce, strengthen our economy and global competitiveness, and elevate national security and resilience. Based in Pittsburgh, PA since 2017, with a satellite office in St. Petersburg, FL, the ARM Institute is leading the way to a future where people & robots work together to respond to our nation’s greatest challenges and to produce the world’s most desired products. For more information, visit www.arminstitute.org and follow the ARM Institute on LinkedIn and X (formerly Twitter).