ARM Selects New Technology Projects for Funding
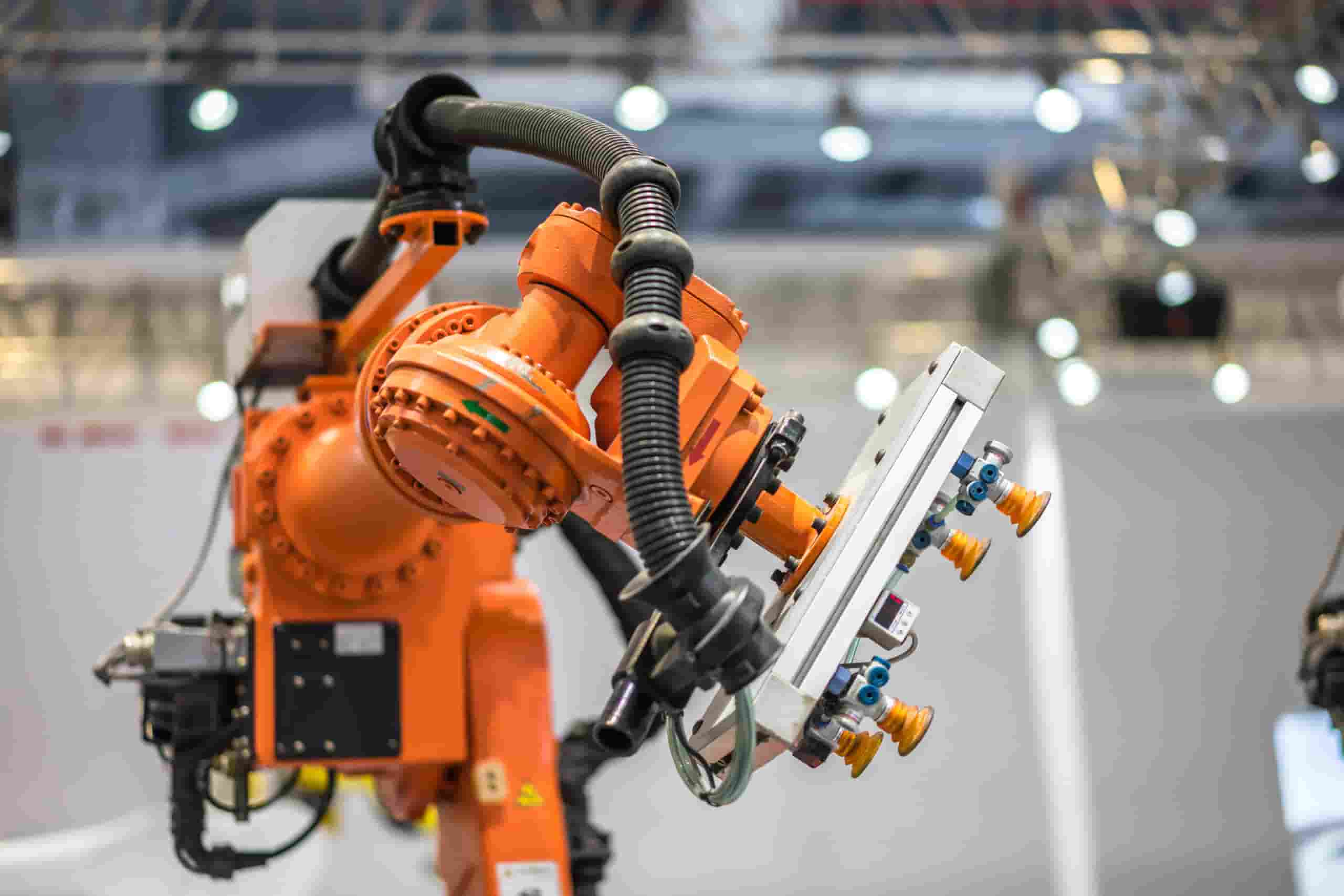
The selected projects focus on strengthening US manufacturing through the development of robotic solutions.
October 8, 2019- ARM (Advanced Robotics for Manufacturing) is pleased to announce six new selected projects from its fourth Technology Project Call that took place earlier in 2019. With the selection of these six projects, more than 40% of ARM Members are involved in one or more project. Pending final negotiations, ARM plans to provide more than $2.5M in funding for a total investment of approximately $5.8M across the six projects.
ARM projects require that at least one industry organization participates on each project to ensure that the outputs are relevant, applicable, and impactful. The projects are selected by a team of ARM Members and partners spanning government, industry, and academia.
“We believe that the outputs from these projects will address critical areas of need in US manufacturing.” Noted ARM Chief Technology Officer, Arnie Kravitz, “The projects focus on the development of robotic solutions that empower American workers while lowering the cost of manufacturing in the United States. When we strengthen the state of manufacturing, we secure a better future for all Americans.”
The six selected projects are briefly described below:
Automated Defect Inspection of Complex Metallic Parts
Principal Investigator: University of Washington
Brief Description: This project seeks to build an advisor robotic platform that will provide comprehensive parts inspection of complex metallic components and high-fidelity recommendations for defect identification and characterization. Currently, there is no commercially available reliable advisor robotic inspection system because high reflectivity and the complex geometry of parts hinder accurate characterization of surface profiles. Drawing on subfields of imaging, sensor fusion, and robot controls, this project proposes a high-quality, consistent surface profiling with robotic acquisition of the right type of data. From there, the project will devise machine intelligence for fault identification based on data analytics that continuously improve inspection performance using accumulating data. While the project focuses on application in the aerospace market, the results also have the potential to impact automotive, agriculture, and consumer goods markets.
Collaborative Composite Sheet Layups
Principal Investigator: United Technologies Research Center (UTRC)
Brief Description: Currently, 90% of composite sheet layup is completed manually; this manual process leads to low throughput, high ergonomic risk exposure, and high labor costs. While a Human Robot Collaborative (HRC) approach may seem like an alternate solution, current safety standards in HRC are structured either in a stop-and-go fashion, which can damage the composite materials, or use significantly slower robot movements, decreasing productivity. This project proposes an HRC approach to composite layups that uses the following innovations: a perception-based framework to estimate actions performed by a human, a planning system to select the robot action that better suits the estimated human actions, and an execution monitoring layer to track the state of the cell to prevent errors/collisions.
Development of a Cost-Effective Robotic Sewing System
Principal Investigator: Rensselaer Polytechnic Institute
Brief Description: Apparel manufacturing has seen very little innovation over the past decade, as the costs to move production overseas are often lower than the cost to invest in developing needed automation. There are also currently no commercially available robotic solutions that can reliably grasp a single layer of fabric from a bundle. This project focuses on the development of a robotic system that can accurately pick and place select fabric types that represent a substantial share of the apparel market, focusing specifically on men’s trousers. This innovation has the potential to greatly strengthen and possibly re-shore apparel manufacturing, from the manufacturing of military uniforms and fire retardant clothing to more commercial wear.
Handling and Direct 3D Draping of Limp Materials
Principal Investigator: GE Global Research
Brief Description: No commercial, turn-key system currently exists for direct 3D placement of limp materials (composites, textiles, etc.) in small and medium-sized manufacturing plants. Additionally, applications of existing end of arm tooling designs are often narrowly focused, inflexible, and require large time and capital investments to realize. This project seeks to reduce the cost and risk associated with implementing 3D layup for new parts and geometries through the construction of a modular test cell for evaluating 3D placement techniques. The project includes evaluation of existing EOAT designs against a representative set of part geometries. Additionally, the project focuses on the creation of an “advisor” rubric and modeling approach for assessing the suitability of EOAT – geometry pairings.
Open Source Teach Pendant Programming Environment
Principal Investigator: Rensselaer Polytechnic Institute
Brief Description: This project seeks to reduce the barrier for entry for utilizing open source robotics through the development of vendor-independent programming that can be easily moved, integrated, and adapted. This will be accomplished through four primary innovations. The first being a restricted Python dialect optimized for use for use in an industrial programming environment. The project will also develop a custom program execution environment for the developed Python dialect. The team will also create a touch screen user interface software for a teach pendant that can also provide a full programming environment when running on a laptop or tablet. Finally, a prototype teach pendant will be developed to test the software and will become the basis for future commercial products.
Robotic Sanding & Finishing Phase 2
Principal Investigator: Lockheed Martin
Brief Description: This is follow-on funding provided to a previously awarded ARM sanding and finishing project. Phase two of this project will build on the first funded project’s foundation while adding considerations for robustness, improved performance, flexibility, and ease-of-operation for multiple products with complex geometries, larger dimensions, and a variety of materials for sanding. Phase two will culminate in demonstrations that highlight the system’s ability to adapt to a range of part geometries, sizes, and materials.
ARM Members can connect with project team members and learn more about our selected, active, and completed projects at the 2019 Member Meeting. Email [email protected] for more information about our Member Meeting, being held November 5-7 in Pittsburgh, PA.
ABOUT ARM
Advanced Robotics for Manufacturing (ARM) is the nation’s leading collaborative in robotics and workforce innovation. Structured as a public-private partnership, we accelerate transformative robotic technologies and education to increase U.S. global manufacturing competitiveness. Founded in January 2017 in Pittsburgh, PA by Carnegie Mellon University, and funded by the Department of Defense, ARM is part of the Manufacturing USA® network. Learn more at www.arminstitute.org. Note: The ARM headquarters has relocated to Mill 19 A. Our updated main phone number is (412) 785-0444. Our address is: Mill 19 A Suite 200, 4501 Lytle St. Pittsburgh, PA 15207