
Project Team
Boeing (Principal Investigator), Spirit Aerospace, and Sensory Robotics
Background
This technology project was selected from the ARM Institute’s 25-01 Core-Funded Tech Project Call that addressed the following special topic areas:
- Rapid Re-Tasking and Robot Agility
- Multi-Robot, Multi-Human Collaboration
- Adaptive Real-Time Path Planning and Control
In addition to these Special Topic Areas, the ARM Institute, in collaboration with the institute Technical Advisory Committee (TAC), government partners, and other consortium experts, outlined the following manufacturing areas of interest that project teams were encouraged to leverage as example use cases: (1) casting and forging, (2) manufacturing of hypersonics, (3) manufacturing of energetics, (4) manufacturing of garments and other textile goods, and (4) robotic inspection in confined spaces.
Project Description
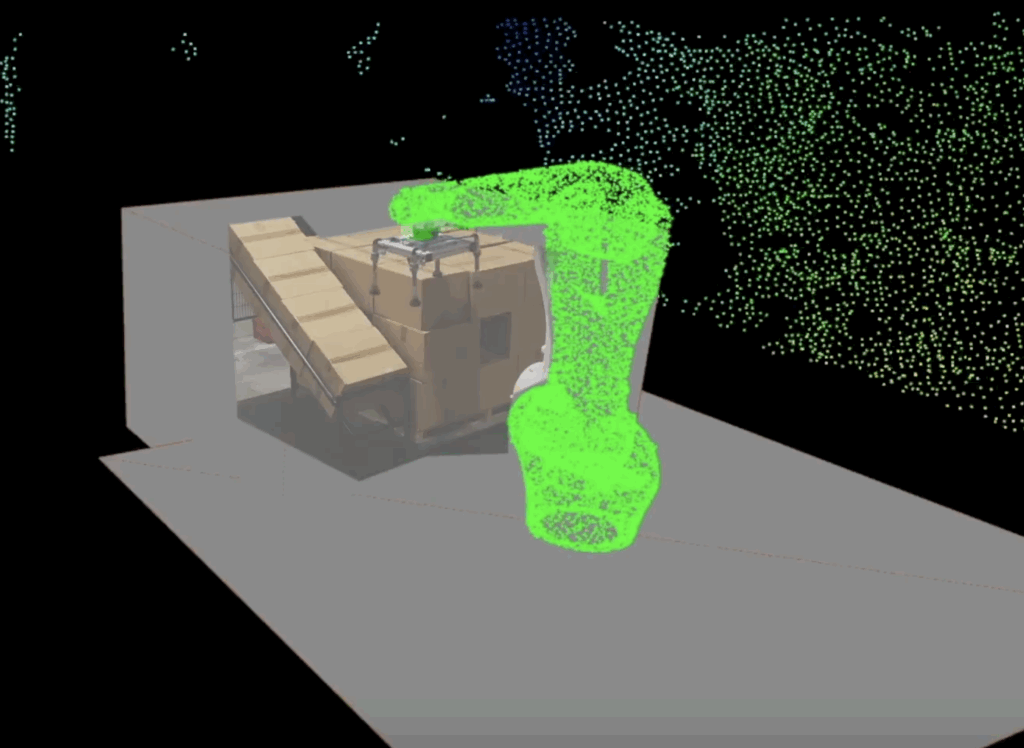
Traditional industrial robotic work cells impose rigid safety measures that limit flexibility, while current collaborative robots (cobots) integrated with Autonomous Guided Vehicles (AGVs) face challenges in dynamic environments due to inadequate safety systems that do not monitor real-time movements. This project team will work to address this gap by developing a modular, platform-agnostic dynamic safety system for mobile cobots integrated with Autonomous Mobile Robots (AMRs) that dynamically adjusts safety zones based on real-time location, velocity, and trajectory.