
Background
This project was selected from our 19-04 Technology Project Call, which focused on catalyzing solutions for Department of Defense Sustainment Activities.
Quality inspection is a manual and costly manufacturing process. While AI-powered robotic 3D scanning systems reduce many unnecessary manual tasks, human-robot interaction is still required to ensure reliable data collection and decision making. Training an operator on how to program robotic 3D scanning takes effort.
Objective
Reduce the manual effort required for path planning and digital twin generation.
Technical Approach
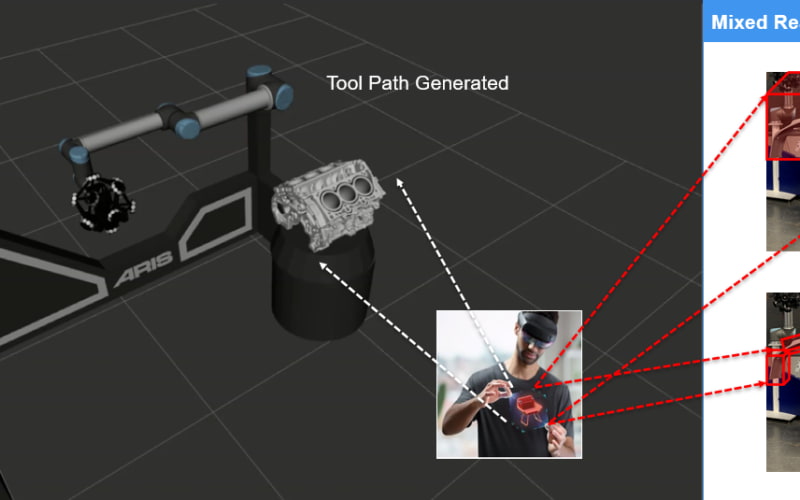
This project focuses on integrating Mixed Reality (MR) with robotic simulation for inspection and asset defects mapping. This innovation will provide improved User Experience (UX) and guidance to human workers in collaborating with the robots, standardize the operating skills needed, and reduce the manual effort required for path planning and digital twin generation.
Participants
Principal Investigator: ARIS Technology
Project Team: Southwest Research Institute (SwRI) and Stellantis (FCA)