
Background
This project seeks to reduce the barrier for entry for utilizing open source robotics through the development of vendor-independent programming that can be easily moved, integrated, and adapted. This will be accomplished through four primary innovations. The first being a restricted Python dialect optimized for use for use in an industrial programming environment. The project will also develop a custom program execution environment for the developed Python dialect. The team will also create a touch screen user interface software for a teach pendant that can also provide a full programming environment when running on a laptop or tablet. Finally, a prototype teach pendant will be developed to test the software and will become the basis for future commercial products.
Objective
This project sought to create a vendor-independent programming to reduce the barrier to entry for using open source robotics.
Technical Approach
Project outputs include the following:
- Restricted Python Dialect optimized for use in industrial programming environments
- Blockly Visual Programming as an alternative to text-based Python to ease adoption and implementation
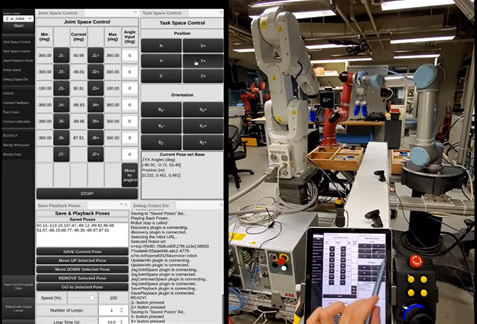
- Touch Screen User Interface to provide a full programming environment
- Prototype Teach Pendant to test the developed software on the composite manufacturing testbed and also act as the basis for future commercial products
Impact
This project has developed two prototype teach pendants (based on Microsoft Surface Pro and Raspberry Pi-4 with a touchscreen) connected to a run-time computer. The demonstrated teach pendant capabilities include robot jogging in joint and Cartesian space, save and playback of waypoints, touch screen and joystick control, same user interface for different types of robots (physical and virtual), easy programming with Blockly, robot motion with collision avoidance, vision-guided motion, and visualization preview of robot motion. The project software is entirely open source and available on GitHub. The current system has been tested with ABB 1200, Sawyer, UR5 robots, and multiple camera inputs.
Next Steps
The project has now developed working prototypes of the open source teach pendant. The next step is to increase the diversity of robots and sensors the teach pendant can support, and broaden the range of plug-in programs. The team will also embark on training and tutorial programs to increase awareness, and encourage adoption and improvement of open source robotics.
The ARM Institute’s role in making this project successful
“The ARM Institute’s support of this project is critical to bring the concept of open-source teach pendant to reality. ARM Member community meetings and forum have fostered interaction and discussion about industrial needs of this technology, which then led to the formation of the project team. The ARM Institute provides the funding for this project, with significant cost sharing from NYSTAR of New York State. ARM Institute project management is highly supportive to help address challenges and issues, especially during the global pandemic.”
Participants
Rensselaer Polytechnic Institute (Principal Investigator), Wason Technology, Southwest Research Institute, GE Global Research, United Technology Corporation