Project Team
Principal Investigator: Rensselaer Polytechnic Institute
Partners: Ensign-Bickford Aerospace & Defense, US Army, DEVCOM Armaments Center, Interface Technologies
Background & Problem Statement for Material Handling Robots in Energetics Manufacturing
This robotics project was funded through an ARM Institute Project Call that sought to respond to pervasive areas of need in U.S. manufacturing and, specifically, address key Department of Defense (DoD) manufacturing-focused Modernization Priorities. This project and the other selected projects from this Project Call address issues found by the DoD and commercial community to be the most urgent and important that the ARM Institute’s ecosystem of 380+ member organizations can help solve.
The manufacturing of energetics, also commonly referred to as explosives, is inherently dangerous for the human operators. Despite this danger, current manufacturing processes are still highly manual. Exposure to external stimuli such as heat, shock, electrical current and flame can cause the energy to be quickly released, resulting in fires and other hazardous situations that can lead to injuries and even death. Material handling robots work to reduce the hazard and inefficiencies of this manufacturing environment.
The handling and use of energetic materials in the manufacturing environment must prevent exposure of the material to accidental sources of initiating energy. Due to the safety precautions required, the processes are very labor intensive and involve several non-linear, non-concurrent steps which add to the cycle time and logistical burden to produce in-process material as well as finished pieces.
The ARM Institute Safe Robotic Handling of Energetic Materials Technology Project, led by Rensselaer Polytechnic Institute in partnership with Ensign-Bickford Aerospace & Defense, Interface Technologies, and US Army, DEVCOM Armaments Center, worked to develop a material-handling robotic system for an energetics refilling operation.
Technical Approach to Material Handling Robots in Energetics Manufacturing

In the current process, a human operator is required to replenish a hopper as the material is consumed, roughly every 30 minutes. To do so, the operator obtains a cannister containing energetic material, climbs a set of mezzanine stairs, opens a hopper lid, and adds the energetic material to the hopper. This process is then repeated throughout the day to maintain the appropriate level in the hopper.
The Safe Robotic Handling of Energetic Materials Technology Project Team developed a material-handling robotic system to safely fill and maintain the level of energetic material in the hopper in the production room. To do this, the team developed the following major hardware and software components:
- A custom-designed cabinet that houses two trays of multiple canisters. The uppermost tray holds filled, capped canisters and the bottom tray holds empty canisters. A rear door provides access to the operator for loading and unloading trays. A front vertically actuated door provides the robot access to interface with the trays and canisters. A de-capping mechanism is also located on the cabinet to remove lids from the filled canisters. The cabinet is located next to the processing equipment, within the robot reach footprint.
- An engineered tray that holds multiple filled or empty canisters that can be easily loaded and transported by an operator.
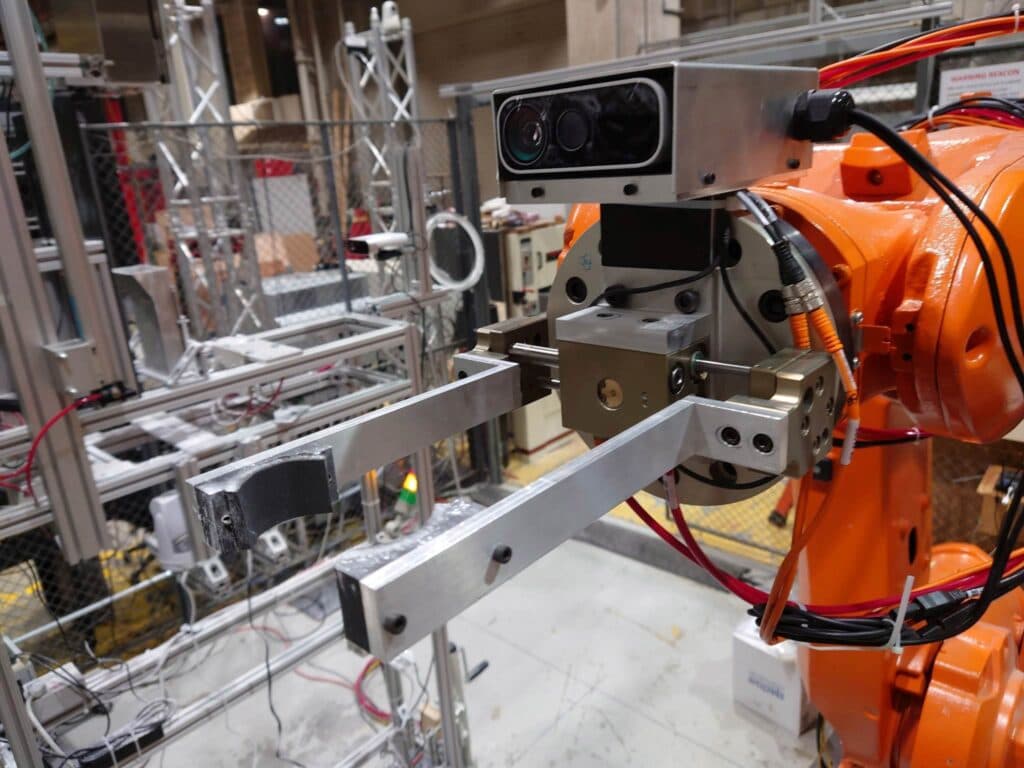
- A custom-designed 6-axis robotic system with an end of arm tool (EOAT) that contains a gripper designed to grasp and securely hold the canisters during the process. A camera mounted on the EOAT detects if a canister is present in the tray position during pickup and detects an open tray position when returning the empty canister to the cabinet and ensures controlled grasping throughout the process.
- A hopper sub-assembly was designed to mimic the actual hopper on the processing equipment at Ensign Bickford. The hopper contains a downward facing camera that detects the hopper level and controls the refilling process. A vertically actuated door is opened when loading product to the hopper and closed after loading to reduce airborne dust.
- Supervisory control software on the WorkGroup Controller (WGC) platform was developed to enable remote operators to monitor and control the replenishment of energetic material. Components of the software included:
- User interface for real-time display, alarming, and corrective actions
- Supervisory control of camera, I/O, robotic control services
- Safety interlocking and error handling
- Control process camera and light tower
- Service interface and simulation software – “Snake” (So-named because it communicates with the Python control services)
In addition to the hardware and software mentioned above, the project team also tested various powders to closely mimic the consistency, weight, and behavioral characteristics of typical energetic materials. Different pouring methods were also extensively tested to minimize the dust plume that results when loading the powder into the hopper.
In the new process, the operator will transport a tray of full canisters to the robotic system. The operator will unload the existing tray of empty canisters from the cabinet, reposition the empty tray to the lower position in the cabinet and load a full tray of product to the upper tray position in the cabinet. The material handling robotic system then automatically manages and performs the refilling activities throughout the day, eliminating the need for the operator to make repeated trips throughout the shift to manually refill the hopper.
Project Results
This technology developed through the partnership between the ARM Institute, Rensselaer Polytechnic Institute, Ensign-Bickford Aerospace & Defense, US Army, DEVCOM Armaments Center and Interface Technologies, is the first step in making safe energetic material handling a solution for the future. The methods that have been chosen and demonstrated greatly minimize the human touch and exposure points associated with energetic processing. The RPI team successfully demonstrated the following capabilities for the Safe Robotic Handling of Energetic Materials project:
- Improved safety by greatly reducing the manual processes.
- Zero-line stoppages due to insufficient material and operator delays during shift
- Eliminated productivity losses due to spillage
- 100% compliance with all safety regulatory requirements
Beyond defense applications, this automated system could be used in industries that require careful dispensing of fine powders, such as cosmetics, pharmaceuticals, and food processing. Future research based on the CDIP from this project could automate hydraulic pressing of shaped charges, which are explosive charges shaped to focus the effect of the explosive’s energy. The oil and gas industry extensively uses shaped charges. Shaped charges are also used in the demolition of buildings and structures, quarrying, breaking up ice, breaking log jams, and drilling post holes.
Impact for the Department of Defense (DoD)
The advancements from this project can be utilized in all DoD energetic manufacturing processes that currently require humans to replenish energetic powdered material during production. This increases worker safety, and reduces the operating costs associated with energetics manufacturing.
This project is based on the WGC software platform used in two prior ARM Institute projects. The ARM Consortium Intellectual Property (CDIP) developed under this partnership include:
- Hopper fill detection
- Energetics pouring optimization (minimized dust cloud)
- Robot Raconteur © interface
- Canister uncapping
- User Interface software module
- Cap, canister, and tray detection
Next Steps
The results of this project are being used to inform future plans for manufacturing process automation in at least one DoD contractor. In addition, the project team has built upon the outcomes of this project to develop a proposal in response to a request for a production system in energetics processing to be deployed at a DoD facility. Lastly, the project team is in discussions with the NIST Manufacturing Extension Program to transition the technology to a DoD-focused manufacturing engineering training and workforce development facility, furthering the applications of material handling robots for energetic materials manufacturing.
About the ARM Institute
The Advanced Robotics for Manufacturing (ARM) Institute is a Manufacturing Innovation Institute (MII) funded by the Office of the Secretary of Defense under Agreement Number W911NF-17-3-0004 and is part of the Manufacturing USA® network. The ARM Institute leverages a unique, robust, and diverse ecosystem of 300+ consortium members and partners across industry, academia, and government to make robotics, autonomy, and artificial intelligence more accessible to U.S. manufacturers large and small, train and empower the manufacturing workforce, strengthen our economy and global competitiveness, and elevate national security and resilience. Based in Pittsburgh, PA since 2017, the ARM Institute is leading the way to a future where people & robots work together to respond to our nation’s greatest challenges and to produce the world’s most desired products. For more information, visit www.arminstitute.org and follow the ARM Institute on LinkedIn and Twitter.
Join our mailing list